Welcome to our website! Next is first progress about our project. If you have any problems about it,
you can ask me via my email:2207000342@qq.com
Team & Project
| 课程名称: 图像分析与理解 项目名称: 3D Rigid Object Tracking HeadLine: 6/17/2016 队员姓名:杨梅,许佳琪,罗音 华中科技大学 电子信息与通信学院 |
Introduction
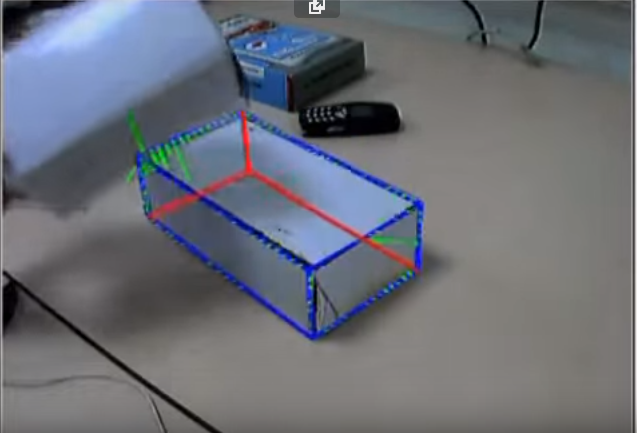
| The objective of 3D rigid object tracking is to associate 3D target objects in consecutive video frames and meanwhile estimate the relative pose (3D translation and 3D rotation) between the 3D targetand the camera. Rigid means the relative position among object components do not change. For instance, a cup, a book and a car are rigid object while a human face and a cat are non-rigid object. It has a variety of uses, some of which are: humancomputer interaction, security and surveillance, video communication and compression, augmented reality, traffic control, medical imaging and video editing.3D object tracking can be especially difficult when the objects are moving fast relative to the frame rate. Another situation that increases the complexity of the problem is when the tracked object changes orientation over time. For these situations the tracking system usually employs a motion model whichdescribes how the image of the target might change for different possible motions of the object. |
Progress
| 1 Building our teams, selected our projects and make a site for generating links 2 Understanding some basic knowledge of 3D rigid object tracking and watching the relevant video |
Next Plan
| 1 Reading a lot of references literature 2 Understandings the basic principle of correlation algorithms 3 Determining the final implementation |
Demo
Image:
Video:
More info: YouTube video two
More info: YouTube video three
More info: YouTube video four
References
[1]. Multiple 3D Object Tracking for Augmented Reality, In ISMAR, 2008.
[2]. https://www.ssontech.com/tutes/tuteobj.html
[3]. Manipulator and Object Tracking for In-Hand 3D Object Modeling, IN IJRR, 2011.
[4]. Robust Statistics for 3D Object Tracking, In ICRA 2006.
[5]. Real-time 3D Object Pose Estimation and Tracking for Natural Landmark Based Visual Servo. In IROS.