由于这周实验室比较忙,加上准备考试,所以网站更新较慢,下周把进度赶上。
Team & Project
| 课程名称: 图像分析与理解 项目名称: 3D Rigid Object Tracking HeadLine: 6/17/2016 队员姓名:杨梅,许佳琪,罗音 华中科技大学 电子信息与通信学院 |
Introduction
| The objective of 3D rigid object tracking is to associate 3D target objects in consecutive video frames and meanwhile estimate the relative pose (3D translation and 3D rotation) between the 3D targetand the camera. Rigid means the relative position among object components do not change. For instance, a cup, a book and a car are rigid object while a human face and a cat are non-rigid object. It has a variety of uses, some of which are: humancomputer interaction, security and surveillance, video communication and compression, augmented reality, traffic control, medical imaging and video editing.3D object tracking can be especially difficult when the objects are moving fast relative to the frame rate. Another situation that increases the complexity of the problem is when the tracked object changes orientation over time. For these situations the tracking system usually employs a motion model whichdescribes how the image of the target might change for different possible motions of the object. |
Progress
一 阅读了老师给的4篇文献,了解了相关算法,做出归纳:
| 1 Multiple 3D Object Tracking for Augmented Reality 文章是实现多目标跟踪,所以就把目标检测和帧对帧跟踪结合其他,第一次出现的新物体,直接就可以帧对帧跟踪,但是之前出现过的物体就要讲检测与跟踪结合起来估计物体的状态。 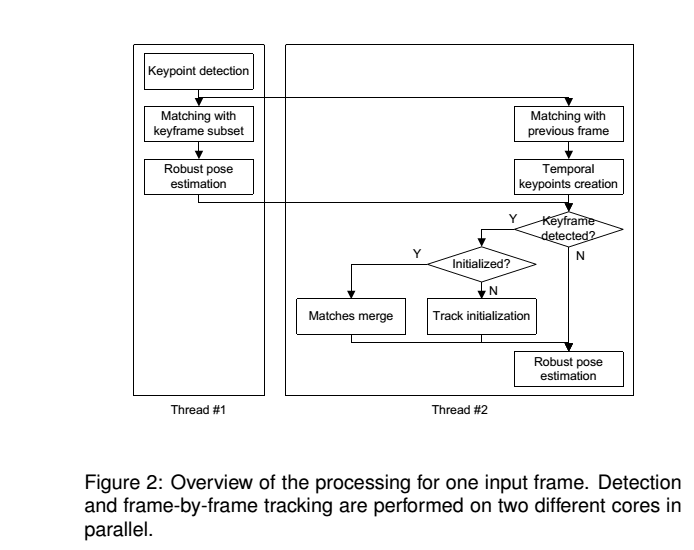 2 Manipulator and object tracking for in-hand 3D object modeling 文章是基于机器人的,物体是拿在机器人手上的,机器人有传感器,所以一开始有一个基本的检测,然后跟踪主要是通过机器人手臂的角度移动来实现,中间提出了一种新的寻找最近点的一个方法,然后加上了一个滤波器来虑除一些遮挡,噪音之类的干扰。 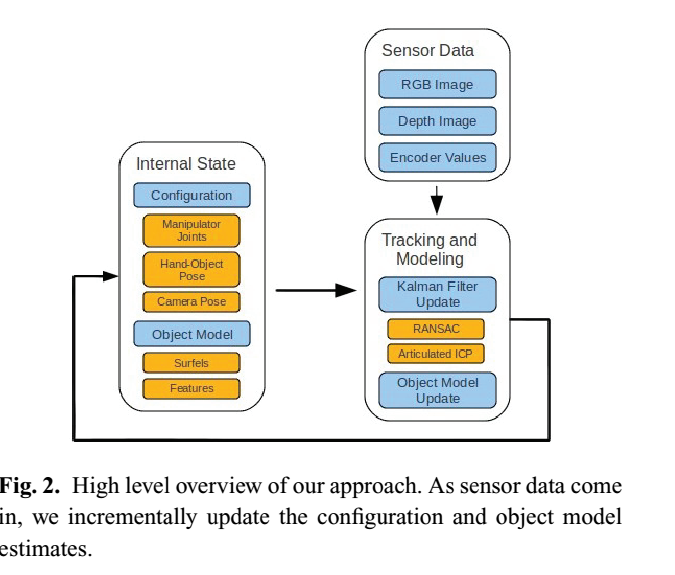 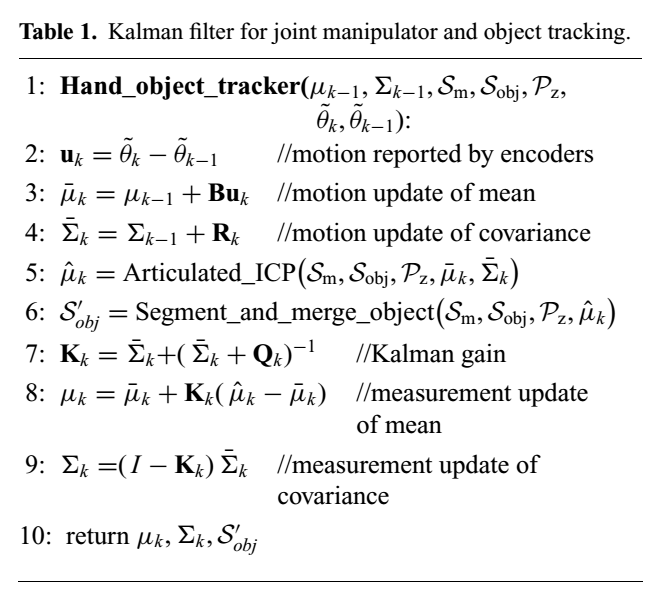 3 Robust Statistics for 3D Object Tracking 文章讲的是3D object tracking的增强表现的方法,主要是对三种statistic method(原始的,M-estimator和RANSAC)和边缘检测的方法进行了评估,最后结论是改进后的基于Kirsch detector的边缘检测的方法效果最好.这里面关于算法讲得不是很详细,主要是对各种方法的评估,然后提出了一个改进的边缘检测的方法 Conclusion: The best recovery after a partial loss of track was achieved with the Kirsch-algorithm. Hence, for a 3D model based tracker, it is better to concentrate on obtaining good measurements with improved detection (Kirsch-filter) than to enhance the matching step with statistical means (Estimators, RANSAC and Histograms). 4 Real-time 3D Object Pose Estimation and Tracking for Natural Landmark Based Visual Servo 可用于实时处理的一个系统,根据摄像机的不同分为mono和stereo两种,里面分别给出了两种算法,如果对速度有要求的话用前面的,后面的stereo更注重精度。实现的时候用到了SIFT和一个KLT算法.   Conclusion:In this paper, a method for tracking 3D roto-translation of rigid objects using scale invariant feature based matching and Kande-Lucas-Tomasi (KLT) tracke is proposed and verified to be used in real-time processing. The method has two mode, mono mode using a mono camera and stereo mode using a stereo camera. Mono mode guarantees higher frame rate performance, and stereo mode shows better pose results. 总结:通过对四篇文献的阅读,我们觉得第一篇文献中提到的算法易于实现。 |
二 在网上查找了相关的算法代码
| 发现Matlab更适用于2D的目标追踪,对于3D的目标我们采用opencv,学起来简单点。 |
Next Plan
1 多参考网上的代码,实现基本的目标追踪功能。
2 学习matlab opencv (可参考范子健、李文杰、邹雨泽“组:http://120.27.106.26/project/wst.php 中给的网址 )
参考网址:
More info: Object Tracking Matlab Code
More info: How to Detect and Track Objects Using Matlab
More info: How to Detect and Track Object With OpenCV
References
[1]. Multiple 3D Object Tracking for Augmented Reality, In ISMAR, 2008.
[2]. https://www.ssontech.com/tutes/tuteobj.html
[3]. Manipulator and Object Tracking for In-Hand 3D Object Modeling, IN IJRR, 2011.
[4]. Robust Statistics for 3D Object Tracking, In ICRA 2006.
[5]. Real-time 3D Object Pose Estimation and Tracking for Natural Landmark Based Visual Servo. In IROS.